하이브리드 선박 모델 설명
하이브리드 선박 모델링을 공부하던 중 각각의 구성과 모델 기본이 되는 수식을 살펴보기 위해 한 논문에 나온 모델링 부분을 정리해보았다.
본 포스팅에 정리된 모델은 이 논문을 참고하였다.
하이브리드 선박 구성
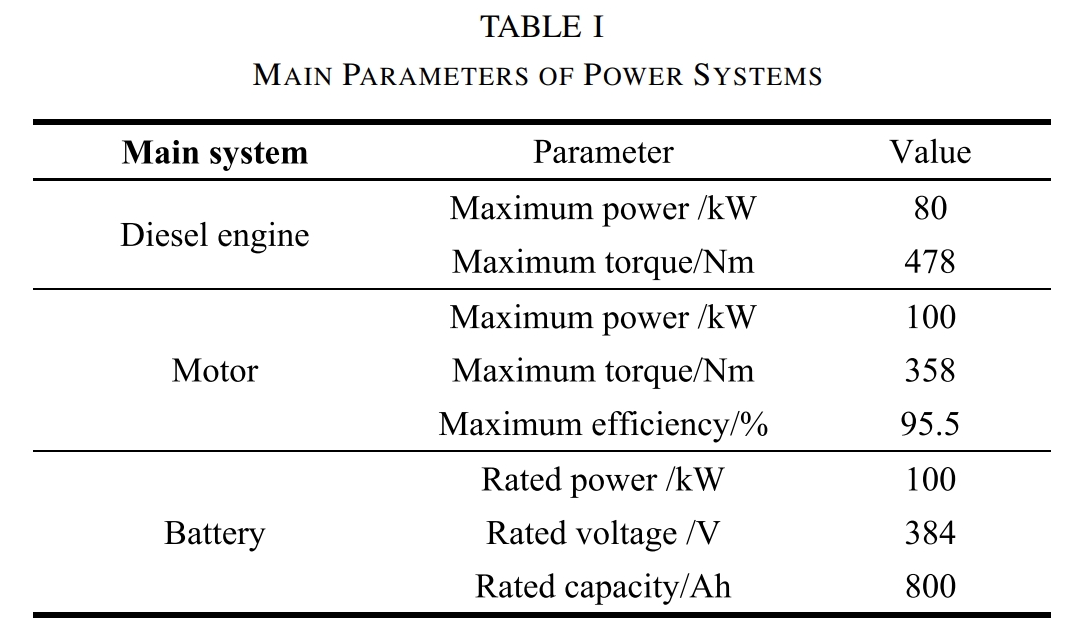
- 디젤 엔진
- 전기 모터
- 배터리 팩
- 기어박스
특징
- 선박의 디젤 엔진과 전기 모터가 선박이 항해하는 동안 동력을 공급하는 추진 장치를 구성
- 디젤 엔진에 잉여 전력이 있을 경우 전기 모터가 기어박스를 통해 구동되어 전기를 생산하여 배터리를 충전할 수 있음

하이브리드 동력 시스템 모델링
배터리 모델
충전 상태를 나타내는 식

- $Q_0 $ : 초기 배터리 용량
- $ Q $ : 배터리의 총 용량
- $ I $ : 출력 전류
현재 SOC 값은 초기 배터리 용량에서 현재까지 사용한 출력 전류의 합을 뺀 값으로 나타낼 수 있다.
배터리 전압과 출력 전류 간의 관계식

위 식은 배터리 단자 전압 U와 출력 전류 I 간의 관계는 배터리의 내부 저항과 전력 손실을 고려한 수식이다. 배터리가 외부 회로에 연결될 때 출력 전류 I가 단자 전압 U, 내부 저항 R_int, 출력 전력 P_bat 과 어떻게 상호작용하는지를 설명한다.
- $ U $ : 배터리의 단자 전압. 배터리가 외부 부하에 연결되었을 때 양극과 음극 사이에서 측정되는 전압.
- $ R $ : 배터리의 내부 저항. 배터리 내부에서 전류가 흐를 때 발생하는 저항으로 인해 전압 강하가 발생하게 됨.
- $P_{batt}$ : 배터리의 출력 전력. 이는 배터리가 외부 회로에 공급하는 실제 전력을 의미함.

위 식은 배터리 단자의 실제 전압 U를 계산할 때 배터리 개방회로 전압 U_oc 에서 배터리의 내부 저항으로 인한 전압 손실을 고려한 식이다.

2, 3 식을 통해서 배터리의 출력 전력 P_batt을 계산할 수 있다.
식 4는 배터리의 실제 출력을 계산할 때 내부저항에 의해 발생되는 손실을 제외하고 계산한 식이다.
- $P_{batt}$ : 배터리의 출력 전력(배터리에서 외부 회로로 공급되는 전력)
- $ U $ : 배터리의 단자 전압(배터리가 외부 회로에 공급하는 실제 전압)
- $ I $ : 배터리의 출력 전류
- $ R $ : 배터리의 내부 저항
디젤 엔진 모델

디젤 엔진의 출력 전력은 위 식으로 계산된다.
- $P_{eng}$ : 디젤 엔진의 출력 전력(단위: W 또는 kW)
- 출력 전력은 엔진이 외부에 실제로 전달하는 기계적 에너지를 의미한다.
- $T_{eng}$: 엔진의 토크(단위: N·m, 뉴턴미터)
- 토크는 엔진이 회전력을 발생시키는 힘의 크기를 나타낸다. 디젤 엔진에서 발생하는 토크는 엔진의 크기와 연료 효율성, 연소 과정에서 발생하는 힘에 의해 결정된다.
- $N_{eng}$ : 엔진의 회전 속도(단위: rpm, 분당 회전수)

디젤 연료 소비량 F_eng는 아래 함수로 나타낼 수 있다. 위 식에서 function_interp2는 보간함수 사용을 의미하며, T_eng, N_eng과 F_eng의 데이터가 있을 때 상관관계를 식으로 나타낼 수 있음을 의미한다.
- $F_{eng}$ : 디젤 엔진의 연료 소비량(fuel consumption)

이 수식은 보간 함수가 출력 전력과 연료 소비량 간의 관계를 표현한다는 의미이다.
- $F_{eng}$ : 디젤 엔진의 연료 소비량 (fuel consumption)
- $P_{eng}$ : 디젤 엔진의 출력 전력 (output power), 단위는 와트(W) 또는 킬로와트(kW)

디젤 엔진의 총 연료 소모량은 연료 소모량을 계산하는 식이다. 연료 소모량은 연료 소비량과 출력 전력의 곱을 적분하여 계산한다.
- $F_{eng_total}$ : 디젤 엔진의 누적 연료 소비량 (cumulative fuel consumption), 단위는 리터(L) 또는 킬로그램(kg)
모터 모델
모터 출력 전력 식

위 식은 주어진 모터의 출력 전력을 계산하는 수식이다.
- $ P_{mot} $ : 모터의 출력 전력 (단위: kW 또는 W)
- $ T_{mot} $ : 모터가 생성하는 토크 (단위: N·m, 뉴턴미터)
- $ N_{mot} $ : 모터의 회전 속도 (단위: rpm, 분당 회전수)
- 9550: 단위 변환 상수로, 토크와 회전 속도를 이용해 출력을 kW 단위로 변환하는 데 사용됨. 이는 토크가 N·m, 회전 속도가 rpm일 때 출력을 kW로 변환하는 공식

모터의 토크와 회전 속도를 입력으로 받아 모터의 효율을 계산하는 식이다.
- $ E_{mot} $ : 모터의 효율 (motor efficiency, 0에서 1 사이의 값)
- $ T_{mot} $ : 모터의 토크 (단위: N·m)
- $ N_{mot} $ : 모터의 회전 속도 (단위: rpm)

모터의 실제 출력 전력을 계산하는 식이다. 모터로 들어가는 총 입력 전력에 모터의 효율을 곱해서 실제로 출력되는 전력을 계산한다.
- $ P_{mot_{out}} $ : 모터의 실제 출력 전력 (단위: kW 또는 W)
- $ P_{mot} $ : 모터의 입력 전력 (단위: kW 또는 W), 즉 모터로 들어오는 총 전력.
- $ E_{mot} $ : 모터의 효율 (0에서 1 사이)
모터는 단순히 회전 운동을 만드는 것뿐만 아니라, 발전기 모드로도 동작할 수 있다. 이미지에 나온 내용에서, 모터의 발전 모드는 회전 속도와 토크가 특정 조건에 따라 달라지며, P_mot가 음수일 경우 모터는 발전기로 작동하게 된다. 이는 외부 동력에 의해 회전하는 경우로, 기계적 에너지를 전기에너지로 변환한다.
- $ P_{mot}>0 $ : 모터가 구동 역할을 하고 있으며, 기계적 에너지를 외부로 공급하는 상태
- $ P_{mot}<0 $ : 모터가 발전기 모드로 동작하며, 외부로부터 기계적 에너지를 받아 전기에너지를 생성하는 상태
프로펠러 모델

1. 추력 T 계산: 프로펠러가 물 또는 공기에서 발생시키는 추력은 다음과 같은 식 12와 같이 계산할 수 있다.
- $ T $ : 추력 (단위: N, 뉴턴)
- $ K_T $ : 추력 계수(thrust coefficient). 이는 프로펠러의 형상, 각도, 회전 속도 등 여러 요인에 따라 달라진다.
- $ ρ_{water} $ : 유체의 밀도(물 또는 공기). 물은 약 1000kg/m^3, 공기는 약 1.225kg/m^3
- $ n $ : 프로펠러의 회전 속도(단위: rps, 초당 회전수)
- $ D $ : 프로펠러의 직경 (단위: m, 미터)
2. 토크 Q 계산: 프로펠러는 회전할 때 물리적인 회전 저항을 받으며, 이 저항을 극복하기 위해서는 토크가 필요하다. (식 13)
- $ Q $ : 토크 (단위: N·m, 뉴턴미터)
- $ K_Q$: 토크 계수(torque coefficient). 이 값은 추력 계수 KT와 마찬가지로 프로펠러의 특성에 따라 달라진다.
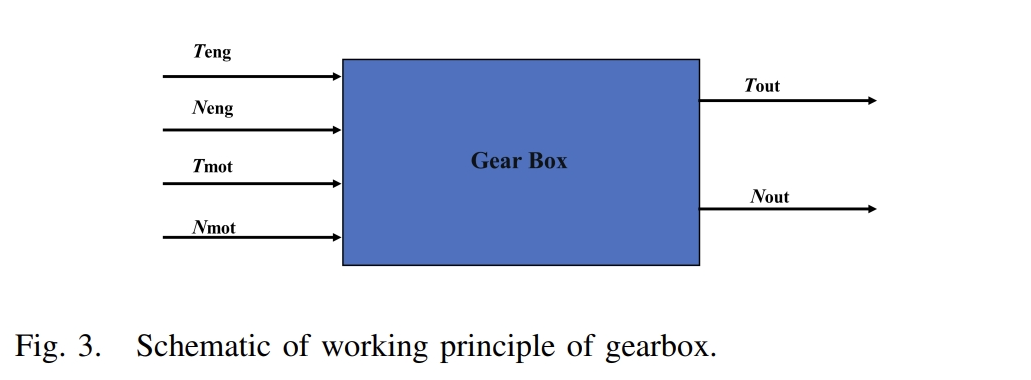
기어박스 모델
기어박스 모델은 기어박스(변속기)를 수학적으로 설명하는 모델로, 주로 입력 토크와 출력 토크, 그리고 효율을 계산하는 데 사용된다. 기어박스는 엔진이나 모터와 같은 동력원이 생성하는 동력을 일정 비율로 변환해 출력 축에 전달하는 장치이다. 이를 통해 회전 속도나 토크를 제어할 수 있으며, 최적의 성능을 유지하도록 준다.
즉, 기어박스는 감속 또는 증속할 수 있는 장치로, 주로 기어비를 통해 회전 속도를 조정하고, 그에 따라 토크도 변한다.
기어박스 모델의 역할
기어박스는 선박의 디젤 엔진과 가역 모터를 연결하여, 두 개의 서로 다른 동력원을 결합하고 최종적으로 선박의 추진력을 위한 적절한 회전 속도와 토크를 생성한다. 이 모델은 입력되는 토크와 회전 속도를 적절히 변환하여, 선박의 프로펠러를 효율적으로 구동할 수 있도록 해준다.
디젤 엔진과 모터는 각각 고유한 토크와 회전 속도를 가지고 있으며, 기어박스를 통해 이 두 입력이 조화롭게 결합된다. 기어박스는 출력 회전 속도를 조정하여 프로펠러가 적절한 속도로 회전하도록 돕고, 출력 토크를 통해 선박을 추진하는 데 필요한 힘을 제공한다.
출력 토크 T_out 계산

위 식은 디젤 엔진의 입력 토크와 모터의 입력 토크를 모두 고려하여 기어박스의 최종 출력 토크를 계산하는 방식이다. 디젤 엔진의 토크는 기어비 i_eng에 의해 조정되고, 마찬가지로, 모터의 토크도 모터의 기어비 i_mot에 따라 변환된다.
→ 두 가지 토크(디젤 엔진과 모터)를 서로 조합하고, 최종적으로 효율을 곱하여 출력 토크를 계산하는 방식
- $ T_{out} $ : 기어박스의 출력 토크 (단위: N·m, 뉴턴미터)
- $ T_{eng} $ : 디젤 엔진의 입력 토크 (단위: N·m)
- $ T_{mot} $ : 모터의 입력 토크 (단위: N·m)
- $ i_{eng}$ : 디젤 엔진 쪽의 기어비 (비율로 표시)
- $ i_{mot} $ : 모터 쪽의 기어비 (비율로 표시)
- $ η $ : 기어박스 효율 (0에서 1 사이의 값으로, 마찰 등으로 인해 발생하는 에너지 손실을 반영)
출력 회전 속도 N_out 계산

이 식은 입력 회전 속도와 기어비를 사용하여 기어박스의 출력 회전 속도를 계산하는 수식이다.
기어비 i는 입력 회전 속도를 조절하는 요소이다. 예를 들어, 기어비가 높을수록 출력 회전 속도는 느려지고, 기어비가 낮을수록 출력 회전 속도는 빨라진다. 디젤 엔진의 회전 속도와 모터의 회전 속도는 각각 해당하는 기어비에 의해 줄어들거나 늘어나며, 이 값이 최종적으로 출력 회전 속도로 변환된다.
- $ N_{out} $ : 기어박스의 출력 회전 속도 (단위: rpm, 분당 회전수)
- $ N_{eng} $ : 디젤 엔진의 입력 회전 속도 (단위: rpm)
- $ N_{mot} $: 모터의 입력 회전 속도 (단위: rpm)
- $ i_{eng} $ : 디젤 엔진 쪽의 기어비
- $ i_{mot} $ : 모터 쪽의 기어비
선박 전력 수요 모델
선박의 총 동력 요구량 계산
선박의 속도와 추력을 사용하여 필요한 동력 요구량을 계산하는 식이다.
선박의 가속도는 추진력에서 저항력을 빤 값에 의해 결정된다. 선박이 추진할 때, 저항을 이겨내는 추진력이 커질수록 가속도가 증가하는 관계를 설명한다.

- $ P_{req} $ : 총 동력 요구 (선박이 항해하는 데 필요한 동력)
- $ T $ : 선박의 총 추력 (프로펠러가 생성하는 힘)
- $ V_s $ : 선박의 속도
선박의 가속도 계산
선박이 추진할 때, 저항을 이겨내는 추진력이 커질수록 가속도가 증가하는 관계를 설명한다. 선박의 가속도는 추력에서 저항을 뺀 값에 의해 결정되며, 질량이 증가할수록 가속도가 줄어든다.

- $ m $ : 선박의 질량
- $ Δm $ : 추가 질량(연료, 화물 등)
- $ \frac{d V_s}{dt} $ : 선박의 가속도
- $ F_{total resistance} $ : 선박이 겪는 총 저항력
총 저항력
선박이 항해할 때 겪는 총 저항력은 여러 저항 요소의 합으로 계산된다.

- $ F_{still water} $ : 정지한 물에서의 저항(정수 저항)
- $ F_{wave} $ : 파도 저항
- $ F_{air} $ : 공기 저항(바람 저항)
- $ F_{channel} $ : 얕은 물이나 수로에서의 저항
각각의 저항 요소 계산
(1) 정수 저항
물의 밀도, 선박의 젖은 면적, 속도, 그리고 마찰 저항 계수에 따라 저항이 결정된다.

- $ F_{still water} $ : 정수 저항 (still water resistance)
- $ ρ_{water} $: 물의 밀도 (density of water)
- $ S_{wet} $ : 젖은 표면적 (wet area of the ship)
- $ C_F $ : 마찰 저항 계수 (frictional resistance coefficient)
- $ V_s $ : 선박의 속도 (ship speed)
(2) 파도 저항
파도의 높이와 길이, 물의 밀도, 선박의 속도 등에 따라 저항이 달라진다.

- $ F_{wave} $ :파도 저항 (wave resistance)
- $ c_1 $ : 파도 저항 계수 (wave resistance coefficient)
- $ h $ : 파도의 높이 (wave height)
- $ L $ : 선박의 수선 길이 (waterline length)
- $ ρ_{water} $ : 물의 밀도 (density of water)
- $ r $ : 특정한 파도 관련 변수
- $ S $ : 선박의 표면적 (surface area)
- $ V_s $ : 선박의 속도 (ship speed)
(3) 공기 저항
바람의 속도, 공기의 밀도, 그리고 선박이 바람을 맞는 면적에 따라 저항이 달라진다.

- $ F_{air} $: 공기 저항 (air resistance)
- $ C_{wind} $: 바람 저항 계수 (wind resistance coefficient)
- $ ρ_{air} $: 공기의 밀도 (density of air)
- $ S_{area} $: 선박의 바람 맞는 면적 (windward area)
- $ V_{wind} $: 바람의 속도 (wind speed)
(4) 수로 저항
깊은 물 저항과 얕은 물 저항 변환 계수를 사용해 수로에서 발생하는 저항을 계산한다.

- $ F_{channel} $: 수로 저항 (channel resistance)
- $ R_t $: 깊은 수로에서의 저항 (deep water resistance)
- $ f_s $: 얕은 물 저항 변환 계수 (shallow water resistance conversion factor)
(5) 얕은 물 저항 변환
얕은 물에서의 저항을 계산하는 데 사용되는 변환 계수를 계산하는 식이다. 수로의 깊이, 선박의 흘수, 그리고 속도에 따라 저항이 결정된다.

- $f_s$ : 얕은 물 저항 변환 계수 (shallow water resistance conversion factor)
- $c_2$ : 계수 (shallow water resistance 관련 상수)
- $V_s$ : 선박의 속도 (ship speed)
- $d$ : 선박의 흘수(잠기는 깊이)
- $H$ : 수로의 깊이
선박의 속도
선박의 속도는 시간에 따라 추진력과 저항 간의 차이를 적분하여 계산된다.
선박이 시간이 지나면서 저항력을 극복하고 얼마나 빠르게 가속하는지를 계산하는 식이다.

- $V_s$ : 선박의 속도 (ship speed)
- $T$ : 추력 (thrust)
- $F_{total resistance}$ : 총 저항 (total resistance)
- $m$ : 선박의 질량 (mass)
- $V_0$ : 초기 속도 (initial ship speed)
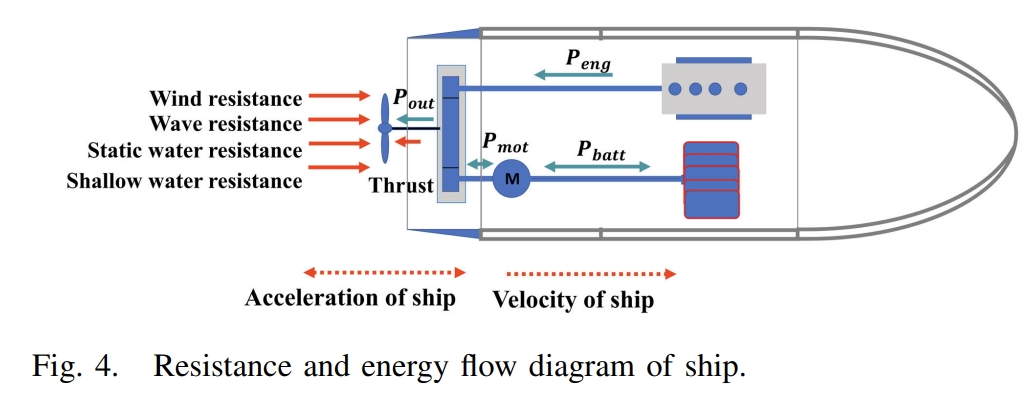
선박이 이동할 때 동력 흐름과 저항력의 상호작용을 시각적으로 설명한 그림은 다음과 같다.
Reference